環架鎖定
環架鎖定(英語:),也稱為萬向鎖,是使用动态欧拉角表示三維物体的旋转時會出現的問題。
簡介
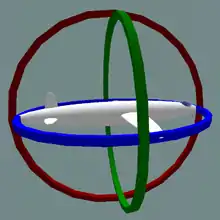
正常狀態:三個獨立的旋轉軸
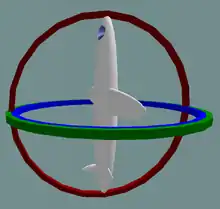
萬向鎖:一旦選擇±90°作為俯角,就會導致第一次旋轉和第三次旋轉等價,整個旋轉表示系統被限制在只能繞豎直軸旋轉,丟失了一個表示維度。
欧拉角有两种:
- 静态:即绕世界坐标系三个轴的旋转,由于物体旋转过程中坐标轴保持静止,所以称为静态。
- 动态:即绕物体坐标系三个轴的旋转,由于物体旋转过程中坐标轴随着物体做相同的转动,所以称为动态。
使用动态欧拉角会出现万向锁现象;静态欧拉角不存在万向锁的问题。
一個典型的萬向鎖問題可以表述如下:先仰45°再俯90°,這與先俯90°再仰45°是等價的。事實上,一旦選擇±90°作為俯角,就會導致第一次旋轉和第三次旋轉等價,整個旋轉表示系統被限制在只能繞豎直軸旋轉,丟失了一個表示維度。這種角度為±90°的第二次旋轉使得第一次和第三次旋轉的旋轉軸相同的現象,稱作萬向鎖。
This article is issued from Wikipedia. The text is licensed under Creative Commons - Attribution - Sharealike. Additional terms may apply for the media files.