Atlas机器人
Atlas机器人(英語:)是一个双足人形机器人,由美国波士顿动力公司为主开发,和由美国国防部国防高等研究计划署(DARPA)的资助和监督。这个身高6-英尺(1.8-) 的机器人是专为各种搜索及拯救任务而设计,并在2013年7月11日向公众亮相。[1]
 Atlas机器人 | |
| 制造厂家 | Boston Dynamics |
|---|---|
| 创造年份 | 2013年 |
| 类型 | 人形机器人 |
| 目的 | 搜索及拯救 |
| 衍生于 | PETMAN |
| 网站 | bostondynamics.com |
设计和开发
Atlas的的设计和生产是由DARPA,美国国防部的一个机构,负责监督与波士顿动力公司合作。机器人的一只手由Sandia国家实验室开发的,而另一个是由iRobot公司开发。[2]在2013年,国防高等研究计划署(DARPA)的项目经理吉尔普拉特(Gill Pratt)把Atlas机器人的原型版本和小孩子相比较,他说:“一个1岁的孩子几乎不能走路,1岁的孩子摔倒了很多......这就是我们现在处于的状态。“[1]
Atlas机器人是基于波士顿动力公司早期的PETMAN人形机器人,它有四个液压驱动的四肢。[3] Atlas机器人由航空级铝和钛建造,身高约6-英尺(1.8-)高,重达330磅(150公斤),蓝光LED照明。[1][3]Atlas机器人配备了两个视觉系统 - 一个激光测距仪和一个立体照相机,由一个机载电脑控制。 它的手具有精细动作技能的能力。[3] 它的四肢共拥有28度的自由度。虽然2013年的原型版本被系链到外部电源来保持稳定,Atlas机器人可以在崎岖的地形行走和攀登独立使用其胳膊和腿。[3]
在2014年,Atlas机器人由六个不同的编程团队将参加国防高等研究计划署(DARPA)的机器人挑战比赛,以测试机器人来执行各种任务的能力,包括进出车辆与驾驶车辆,打开一扇门,和使用电动工具。其他各种机器人也将参与比赛。本次大赛的灵感源自2011年的福岛第一核电站事故,并有200万美元奖金奖励获胜队。[1]
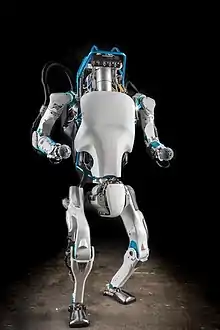
新版本Atlas机器人
2016年2月23日,波士顿动力公司在YouTube上发布了一个新版本Atlas机器人的视频。 新版本的Atlas设计用于在户外和建筑物内部操作。 它专门用于移动操纵,非常擅长在广泛的地形上行走,包括雪地。 它是电动和液压驱动。它使用身体和腿部的传感器进行平衡,并在其头部使用光学雷达和立体传感器,以避免障碍物,评估地形,帮助导航和操纵对象,即使对象被移动。 这个版本的Atlas机器人是大约175 cm(5英尺9英寸)高(大约比DRC Atlas矮一个头),重量为180磅(82)。
参考
- John Markoff. . New York Times. July 11, 2013 [July 14, 2013]. (原始内容存档于2018-07-30).
- Emi Kolawole. . Washington Post. July 12, 2013 [July 14, 2013]. (原始内容存档于2013-08-20).
- Tim Hornyak. . CNET. July 11, 2013 [July 14, 2013]. (原始内容存档于2014-01-05).
外部链接
- Atlas机器人网页 在DARPA机器人竞赛网站 (英文)
- Atlas机器人网页页面存档备份,存于 在波士顿动力公司网站 (英文)