航位推測法
航位推測法(英語:,縮寫:DR)是一種利用現在物體位置及速度推定未來位置方向的航海技術,現已應用至許多交通技術層面,但容易受到誤差累積的影響。英語中「Dead」不是從「deduced(推導)」轉化而來。
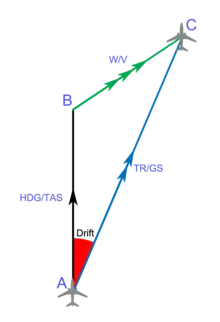
圖中表示因風向的影響,使飛機在直線前進時產生向右偏移。
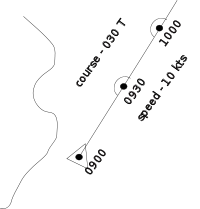
航海家利用早上9點的位置與速度,推估9點半和10點的船隻可能位置。
誤差
航位推測法可以推定精確的位置,但容易受到細微誤差影響。例如:利用輪子的旋轉圈數來測定位移量,但輪子受到溫度變化的收縮影響會產生細微誤差。由於前面的估計值就含有誤差,所以不斷進行後續的推算會造成誤差傳播。
航海
在航海上,航位推測法則稱為「推算航法」,是指在海圖上由一已知之船位(Fix)繪出一連串之航線,僅以所行駛之航向(Course)及航速(Speed)在不考慮水流及風之影響下而決定船舶所在的概略位置(Approximate Position)之過程。[3]
參考資料
This article is issued from Wikipedia. The text is licensed under Creative Commons - Attribution - Sharealike. Additional terms may apply for the media files.
