4D-RCS参考模型架構
4D-RCS参考模型架構(4D/RCS Reference Model Architecture)是有關無人機的参考模型,有關其軟體如何識別及組織的模型。
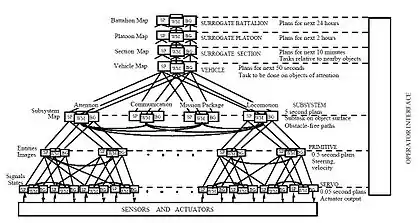
個別車輛的4D-RCS參考模型架構。其中有許多有計算節點組成的層,其中包括感測處理、世界建模、價值判斷及行為產生
簡介
4D/RCS屬於參考模型架構,提供無人地面載具的智慧軟體設計、工程以及整合的理論基礎 [3]。
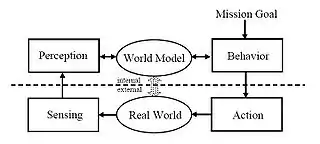
4D/RCS控制環的基本架構
依照Balakirsky (2003)的論點,4D/RCS是協商代理架構的例子。此架構「包括所有設計要符合未來目標的系統。一般而言,系統會依照世界的模型來進行規劃,而不是直接處理感測器信號,然後動作。來源可以是實時的传感器信號、先驗資訊、或是兩者的整合,因此可以產生世界的一個縮影或快照,用來更新世界模型。」[4]。協商代理架構的作用是以世界模型以及要執行的命令任務目的為基礎。如圖所示,目的「可能是給定的系統狀態或實際位置。為了符合目的,這類的系統會試圖在真實世界中的三維空間中計算出路徑。」[4]
4D/RCS中的4D是在每一層(感測處理、世界建模、行為產生)的三維空間中,再加上一個時間維度。
參考資料
 本条目引用的公有领域材料来自National Institute of Standards and Technology的网站或文档。
本条目引用的公有领域材料来自National Institute of Standards and Technology的网站或文档。
- Danil Prokhorov (2008) Computational Intelligence in Automotive Applications. p. 315
- Albus, J.S. et al. (2006). "Learning in a Hierarchical Control System: 4D/RCS in the DARPA LAGR Program". NIST June 26, 2006. in: ICINCO 06 - International Conference in Control, Automation and Robotics, Setubal, Portugal, August 2006
- Douglas Whitney Gage (2004). Mobile robots XVII: 26–28 October 2004, Philadelphia, Pennsylvania, USA. Society of Photo-optical Instrumentation Engineers. page 35.
- S.B. Balakirsky (2003). A framework for planning with incrementally created graphs in attributed problem spaces. IOS Press. ISBN 1-58603-370-0. p.10-11.
延伸閱讀
- Albus, J.S (1988). System Description and Design Architecture for Multiple Autonomous Undersea Vehicles. NISTTN 1251, National Institute of Standards and Technology, Gaithersburg, MD, September 1988
- James S. Albus (2002). "4D/RCS A Reference Model Architecture for Intelligent Unmanned Ground Vehicles". In: Proceedings of the SPIE 16th Annual International Symposium on Aerospace/Defense Sensing, Simulation and Controls, Orlando, FL, April 1–5, 2002.
- James Albus et al. (2002). 4D/RCS: A Reference Model Architecture For Unmanned Vehicle Systems Version 2.2. NIST August 2002
This article is issued from Wikipedia. The text is licensed under Creative Commons - Attribution - Sharealike. Additional terms may apply for the media files.
