PDF控制
偽微分回授控制[lower-alpha 1](pseudo-derivative feedback control)[2],簡稱為PDF控制,是在自動控制中的名詞,是Phelan在1977年在其書《Automatic Control Systems》中提到的控制架構[3],其架構類似PI控制器,但若控制一階系統時,控制器及系統的整體轉換函數沒有零點(若使用PI控制器,整體轉換函數會有一個零點)[4],常用在運動控制中[2]。
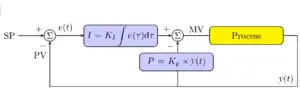
PDF控制器的方塊圖
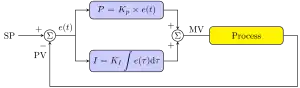
PI控制器的方塊圖
PDF控制器其架構類似PI控制器,但是目標值和回授的誤差(derivative)只作為I(積分)控制器的輸入,誤差不是P(比例)控制器的輸入,改用回授作為P(比例)控制器的輸入。因為誤差不是比例控制器的輸入,因此被Phelan稱為「偽誤差回授」[4]。
PDFF控制
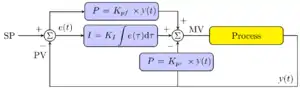
PDFF控制器的方塊圖
後來也有在PDF控制中加入了目標值的前饋控制,即為PDFF控制(Pseudo-derivative feedback forward control),可以提昇控制系統的剛性。
注释
- 偽微分回授的名詞較常出現,例如[1],而根據 Pseudo-Derivative Feedback Control中提到的" Phelan named this structure "Pseudo-derivative feedback (PDF) control from the fact that the rate of the measured parameter is fed back without having to calculate a derivative",若此處的derivative是指微分控制,似乎也可以稱為是偽微分回授控制
參考資料
This article is issued from Wikipedia. The text is licensed under Creative Commons - Attribution - Sharealike. Additional terms may apply for the media files.
