笛卡尔坐标系
笛卡爾坐標系(法語:,英語:,也稱直角坐標系)在數學中是一種正交坐標系,由法國數學家勒內·笛卡尔引入而得名。二維的直角坐標系是由兩條相互垂直、相交於原點的數線構成的。在平面內,任何一點的坐標是根據數軸上對應的點的座標設定的。在平面內,任何一點與坐標的對應關係,類似於數軸上點與坐標的對應關係。






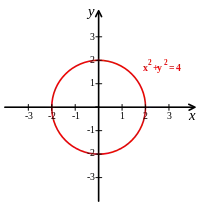
採用直角坐標,幾何形狀可以用代數公式明確的表達出來。幾何形狀的每一個點的直角坐標必須遵守這個代數公式。例如:直線可以用標準式(一般式)、斜截式等式子來表示;一個圓,半徑為,圓心坐標為,則該圓可以用表示。





歷史
笛卡爾坐標系是由法國數學家勒內·笛卡爾創建的。1637年,笛卡爾發表了巨作《方法論》。這本專門研究與討論西方治學方法的書,提供了許多正確的見解與良好的建議,對於後來的西方學術發展,有很大的貢獻。為了顯示新方法的優點與果效,以及對他個人在科學研究方面的幫助,在《方法論》的附錄中,他增添了另外一本書《幾何》(La Géométrie)。有關笛卡爾坐標系的研究,就是出現於《幾何》這本書內。笛卡爾在坐標系這方面的研究結合了代數與歐幾里得幾何,對於後來解析幾何、微積分、與地圖學的建樹,具有關鍵的開導力。
描述
二維坐標系統

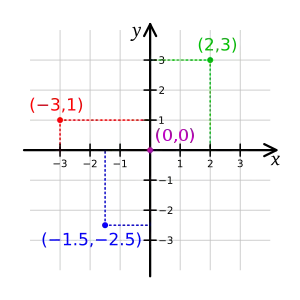
二維的直角坐標系通常由兩個互相垂直的坐標軸設定,通常分別稱為x-軸和 y-軸;兩個坐標軸的相交點,稱為原點,通常標記為O,既有「零」的意思,又是法语「Origine」的首字母。每一個軸都指向一個特定的方向。這兩個不同線的坐標軸,決定了一個平面,稱為xy-平面,又稱為笛卡爾平面。通常兩個坐標軸只要互相垂直,其指向何方對於分析問題是没有影響的,但習慣性地,x-軸被水平擺放,稱為橫軸,通常指向右方;y-軸被豎直擺放而稱為縱軸,通常指向上方。兩個坐標軸這樣的位置關係,稱為二維的右手坐標系,或右手系。如果把這個右手系畫在一張透明紙片上,則在平面內無論怎樣旋轉它,所得到的都叫做右手系;但如果把紙片翻轉,其背面看到的坐標系則稱為「左手系」。這和照鏡子時左右對調的性質有關。
為了要知道坐標軸的任何一點,離原點的距離。假設,我們可以刻畫數值於坐標軸。那麼,從原點開始,往坐標軸所指的方向,每隔一個單位長度,就刻畫數值於坐標軸。這數值是刻畫的次數,也是離原點的正值整數距離;同樣地,背著坐標軸所指的方向,我們也可以刻畫出離原點的負值整數距離。稱x-軸刻畫的數值為x-坐標,又稱横坐標,稱y-軸刻畫的數值為y-坐標,又稱縱坐標。雖然,在這裏,這兩個坐標都是整數,對應於坐標軸特定的點。按照比例,我們可以推廣至實數坐標和其所對應的坐標軸的每一個點。這兩個坐標就是直角坐標系的直角坐標,標記為。

任何一個點P在平面的位置,可以用直角坐標來獨特表達。只要從點P畫一條垂直於x-軸的直線。從這條直線與x-軸的相交點,可以找到點P的x-坐標。同樣地,可以找到點P的y-坐標。這樣,我們可以得到點P的直角坐標。





象限与卦限



平面直角坐標系的兩個坐標軸將平面分成了四個部分,稱為象限,分別用羅馬數字編號為,,,。依照慣例,象限的兩個坐標都是正值;象限的x-坐標是負值,y-坐標是正值;象限的兩個坐標都是負值的;象限的x-坐標是正值,y-坐標是負值。所以,象限的編號是按照逆時針方向,從象限編到象限。






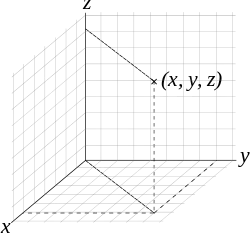
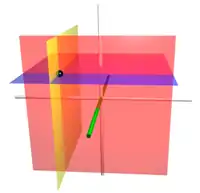
三维直角坐标系的三個平面,xy-平面,yz-平面,xz-平面,將三維空間分成了八個部分,稱為卦限 (octant)。與二維空間的四個象限不同,只有一個卦限有編號。第一號卦限的每一個點的三個坐標都是正值的。
平面笛卡尔坐标的公式











反射
设一个点的笛卡尔坐标是(x, y),则(−x, y)是它跨第二坐标轴(y轴)的反射的坐标,如同这个线是个镜子。类似的,(x, −y)是它的跨第一个坐标轴(x轴)的反射的坐标。一般的说,跨过原点与x轴夹角为的直线的反射,等价于将所有点的坐标(x, y)替代为坐标(x′,y′),这里有:


因此:

滑移反射
滑移反射是跨一个直线的反射和随后在这个直线方向上的平移的复合。可以看出这些运算的次序是无关紧要的(也可以先平移后反射)。
变换的一般矩阵形式
这些平面的欧几里得变换可以使用矩阵以一致的方式来描述。对一个点应用欧几里得变换的结果给出为公式:



这里的A是一个2×2正交矩阵,而b = (b1, b2)是任意的数值有序对[3];也就是:


这里的
- [注意对点坐标使用行向量则矩阵要写在右侧。]

将是正交的,矩阵A必须有正交的有欧几里得长度1的行,就是:

并且:

这等价于说A乘以它的转置矩阵必须是单位矩阵。如果这些条件不成立,则公式描述的是这个平面的更一般的仿射变换,假如A的行列式不是零的话。
公式定义了平移,当且仅当A是单位矩阵。变换是绕某个点的旋转,当且仅当A是旋转矩阵,这意味着:

要得到反射或滑移反射需要:

假定不使用平移,变换可以通过简单将有关的变换矩阵相乘来组合起来。
仿射变换
表示笛卡尔坐标的坐标变换的另一种方式是通过仿射变换。在仿射变换中,增加了一个额外维度而所有点对这个额外维度给出数值1。这么做的好处是点平移可以在矩阵A的最后列中指定。在这种方式下,所有欧几里得变换都可处理成矩阵点乘法。仿射变换给出为:
- [注意来自上式的矩阵A是转置的。矩阵在左侧并对点坐标使用列向量。]

使用仿射变换,多个包括平移的不同欧几里得变换,可以简单的通过把它们对应的矩阵相乘而组合起来。
缩放
仿射变换的不是欧几里得移动的一个例子是缩放。要使一个图形变大或变小,等价于对所有点的笛卡尔坐标乘以同一个正数m。如果最初图形的点的笛卡尔坐标是(x, y),缩放后的图形的对应点有坐标:

如果m大于1,图形变大;如果m在0与1之间,图形变小。


取向
二維空間
直角坐標系的x-軸與y-軸必須相互垂直。稱包含y-軸的直線為y-線。在二維空間裏,當我們設定了x-軸的位置與方向的同時,我們也設定了y-線的方向。可是,我們仍舊必須選擇,在y-線的以原點為共同點的兩條半線中,哪一條半線的點的坐標是正值的,哪一條是負值的?任何一種選擇決定了xy-平面的取向。
通常,我們選擇的取向是,正值的x-軸横地指向右方,正值的y-軸縱地指向上方。這種取向稱為正值取向、標準取向或右手取向。
右手定則是一種常用的記憶方法,專門用來辨認正值取向:將一隻半握拳的右手放在平面上,大拇指往上指,那麼,其它的手指都從x-軸指向y-軸。
另外一種取向,採用左手定則,專門用來辨認負值取向或左手取向:將一隻半握拳的左手放在xy-平面上,大拇指往上指,那麼,其它的手指都從y-軸指向x-軸。
不論坐標軸是何種取向,將坐標系統做任何角度的旋轉,取向仍舊會保持不變。
三維空間
直角坐標系的x-軸、y-軸與z-軸必須相互垂直。稱包含z-軸的直線為z-線。在三維空間裏,當我們設定了x-軸、y-軸的位置與方向的同時,我們也設定了z-線的方向。可是,我們仍舊必須選擇,在z-線以原點為共同點的兩條半線中,哪一條半線的點的坐標是正值的,哪一條是負值的?這兩種不同的坐標系統,稱為右手坐標系與左手坐標系。右手坐標系又稱為標準坐標系或正值坐標系。
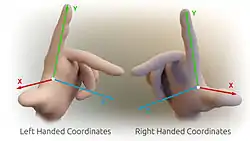
右手坐標系這名詞是由右手定則而來的。先將右手的手掌與手指伸直,然後將中指指向往手掌的掌面半空間,與食指呈直角關係。再將大拇指往上指去,與中指、食指都呈直角關係。則大拇指、食指與中指分別表示了右手坐標系的x-軸、y-軸與z-軸。同樣地,用左手也可以表示出左手坐標系。
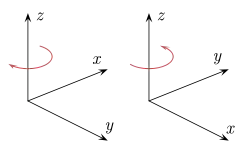
左侧示意圖展示出一個左手坐標系與一個右手坐標系。因為我們用二維畫面來展示三維物體,會造成扭曲或模稜兩可的圖形。指向下方與右方的軸,也有指向讀者的意思;而位置居於中間的軸,也有指向讀者正在看的方向的意思。平行於xy-平面的紅色圓形曲箭,其紅色箭頭從z-軸前面經過,表示從x-軸往y-軸的旋轉方向。
向量
採用直角坐標系,在三維空間裏,任何一點P都可以用向量來表示。我們可以想像向量為一支羽箭,其箭尾在原點,箭鋒在點P。假若點P的向量是,直角坐標是。那麼,


- ;

其中,單位向量,與分別指向x-軸,y-軸,與z-軸指向的正無窮值方向。



參考文獻
- Hughes-Hallett, Deborah; McCallum, William G.; Gleason, Andrew M. 6. John wiley. 2013. ISBN 978-0470-88861-2.
- Smart 1998,Chap. 2
- Brannan,Esplen & Gray(1998),pg. 49
參考目錄
- Descartes, René. Oscamp, Paul J. (trans). Discourse on Method, Optics, Geometry, and Meteorology. 2001.
- Morse PM, Feshbach H. . New York: McGraw-Hill. 1953: p. 656. ISBN 978-0-07-043316-8.
- Margenau H, Murphy GM. . New York: D. van Nostrand. 1956: p. 177.
- Korn GA, Korn TM. . New York: McGraw-Hill. 1961: pp. 55–79. ASIN B0000CKZX7.
- Sauer R, Szabó I. . New York: Springer Verlag. 1967: p. 94.
- Moon P, Spencer DE. . corrected 2nd ed., 3rd print ed. New York: Springer-Verlag. 1988: pp. 9–11 (Table 1.01). ISBN 978-0387184302.