H桥
H橋是一種電子電路,可使其連接的負載或輸出端兩端電壓反相/電流反向。這類電路可用於機器人及其它實作場合中直流電動機的順逆向控制及轉速控制、步进电机控制(双极型步进电机还必须要包含两个H桥的电机控制器)[1],电能变换中的大部分直流-交流变换器(如逆变器及变频器)、部分直流-直流变换器(推挽式变换器)等[2],以及其它的功率電子裝置。
H桥是一个典型的直流电机控制电路,因为它的电路形状酷似字母H,故得名与“H桥”。4个三极管组成H的4条垂直腿,而电机就是H中的横杠
H橋電路,既可以分立元器件形式搭建,也可以整合到積體電路上。[1]「H橋」的名稱起源於其電路,兩個並聯支路和一個負載接入/電路輸出支路,看上去構成了形如「H」字母的電路結構。
工作原理


如图1所示单相桥式逆变电路工作原理开关T1、T4闭合,T2、T3断开:u0=Ud; 开关T1、T4断开,T2、T3闭合:u0=- Ud; 当以频率fS交替切换开关T1、T4和 T2 、T3 时 , 则 在 负载电 阻 R上 获 得交变电压波形(正负交替的方波),其周期 Ts=1/fS,这样,就将直流电压E变成了 交流电压uo。uo含有各次谐波,如果想 得到正弦波电压,则可通过滤波器滤波 获得。
主电路开关T1~T4,它实际是各种半导体开关器件的 一种理想模型。逆变电路中常用的开关器件有快速晶闸管、可关断晶闸管(GTO)、功率晶体管(GTR)、功率场效应晶体管(MOSFET)、绝缘栅晶体管(IGBT)。
在实际运用中,开关器件存在损耗:导通损耗(conduction losses) 和换相损耗(commutation losses) 和门极损耗(gate losses)。其中门极损耗极小可忽略不计,而导通损耗和换相损耗随着开关频率的增加而增加。
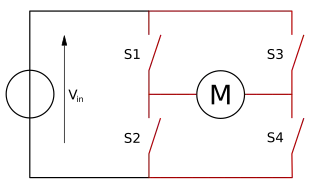
一個H橋有四個開關器件(可以是固態器件,也可以是機械式開關),如H橋電路圖(图2)所示,當開關S1和S4閉合時,開關S2和S3斷開,此時中間橋接的直流電動機兩端加上正向電壓正轉工作。當S1、S4斷開,同時閉合S2、S3時,電動機兩端電壓反相,使電動機反轉工作。在這個電路中,正常工作情況下,一個並聯支路側的開關S1、S2不可能同時閉合,同樣另一側支路的開關S3、S4也是如此,如果某一側支路的開關同時閉合,會將供電電源的正負兩極短路,稱為直通短路。
H橋也可以剎停電動機,來使電動機停轉,具體做法是在電動機運轉時斷開S2、S4,將S1、S3閉合(或斷開S1、S3,將S2、S4閉合)。也可以全部開關斷開,讓電動機自由停轉。下表將S1~S4分別作為一個0/1輸入變量,運行狀態作為一個0/1輸出變量,列出一個邏輯功能表:
- 注:以下的「電動機」均指直流電動機
| S1 | S2 | S3 | S4 | 工作狀態 |
|---|---|---|---|---|
| 1 | 0 | 0 | 1 | 電動機順向(逆向)轉動 |
| 0 | 1 | 1 | 0 | 電動機逆向(順向)轉動 |
| 0 | 0 | 0 | 0 | 電動機自由停止 |
| 0 | 1 | 0 | 1 | 電動機制動 |
| 1 | 0 | 1 | 0 | 電動機制動 |
| 1 | 1 | 0 | 0 | 短路直通 |
| 0 | 0 | 1 | 1 | 短路直通 |
| 1 | 1 | 1 | 1 | 短路直通 |
三相橋式(可控)整流電路/逆變電路,工作原理和H橋類似,都是通過半控式器件/開關器件通斷狀態的改變來實現電能變換。但嚴格來說它們並不完全屬於H橋的範圍。
工作方式
H桥的控制主要分为近似方波控制和脉冲宽度调制(PWM)和级联多电平控制。
近似方波控制
近似方波控制即quasi-square-wave-control, 输出波形比正负交替方波多了一个零电平(3-level),谐波大为减少。优点是开关频率较低,缺点是谐波成分高,需要滤波器的成本大。
脉冲宽度调制
脉冲宽度调制即Pulse width modulation,分为单极性和双极性pwm. 随着开关频率的升高,输出电压电流波形趋于正弦,谐波成分减小,但是高开关频率带来一系列问题:开关损耗大,电机绝缘压力大,发热等等。
级联多电平控制
级联多电平控制即multi-level inverter,采用级联H桥的方式,使得在同等开关频率下谐波失真降到最小,甚至不需要用滤波器,获得良好的近似正弦输出波形。
搭建實作

參見
參考資料
外部連結
- Video tutorial on H-bridges and example bidirectional motor speed controller circuitArchive.is的存檔,存档日期2014-12-20
- H-Bridge Theory and Practice页面存档备份,存于
- Brief H-Bridge Theory of Operation页面存档备份,存于
- H-bridge tutorial discussing various driving modes and using back-EMF页面存档备份,存于
- PWM DC Motor Controller Using MOSFETs and IR2110 H-Bridge Driver页面存档备份,存于
- H-Bridges on the BEAM Robotics Wiki
- Derivation of formulas to estimate H-bridge controller current (Vex, JAGUAR,Victor). Discusses why some H-bridges used in robotics have non-linear current and speed responses.页面存档备份,存于
專案
- Tutorial: Build a 5A H-Bridge motor controller
- Building an H-bridge-controlled motor with photocells to track light
- H-bridge motor control with 4017 (in Turkish)
- Using the HIP4081A for H-bridge control页面存档备份,存于
- Using the L293D H bridge for DC motor control
- A simple circuit designed around L293D motor driver IC页面存档备份,存于
