变频器
变频器(,縮寫:VFD),也稱為变频驅動器或驅動控制器,另有一英文名稱Inverter,和逆變器的英文相同。变频器的英文名稱Variable-frequency Drive,是现代科技中少數源自中文者之一。

变频器是可調速驅動系統的一種,是应用變頻驅動技术改变交流馬達工作电壓的频率和幅度,來平滑控制交流馬達速度及轉矩[1][2]:p210–215[3][4]:p4,最常見的是輸入及輸出都是交流電的交流/交流轉換器。在變頻器出現之前,要調整馬達轉速的應用需透過直流电动机才能完成,不然就是要透過利用內建耦合機的VS馬達,在運轉中用耦合機使馬達的實際轉速下降,變頻器簡化上述的工作,缩小设备体积,大幅度降低维修率。不過變頻器的電源線及馬達線上面有高頻切換的訊號,會造成電磁干擾,而變頻器輸入側的功率因數一般不佳,會產生電源端的諧波。
变频器的應用範圍很廣,從小型家電到大型的礦場研磨機及壓縮機。全球約1/3的能量是消耗在驅動定速離心泵、風扇及壓縮機的馬達上,而變頻器的市场渗透率仍不算高。利用變頻器來控制馬達的轉速,帶來能源效率的顯著提昇,是使用變頻器的主要原因之一。變頻器技術和電力電子有密切關係,包括半導體切換元件、變頻器拓撲、控制及模擬技術、以及控制硬體及韌體的進步等。
名稱
变频器在台灣及韓國因為受到日本廠商影響而曾經被稱作VVVF(Variable Voltage Variable Frequency Inverter),VVVF原為日文「」的英語直譯縮寫。直译为可变电压可变频(控制器,控制元件)。
1980年代中期沈阳居乃明提出VVVF可简化命名为变频器或变频调速器并用于产品设计,他随后在中国起重学会沈阳仓储设备专题年会上正式发表这个意见(参见《年会论文集》)。东北工学院(今东北大学)著名电力控制与拖动专家佟纯厚教授肯定这个意见,并应用在他自己在校内外的课堂和各种讲学中。此后迅速流行开來,而被普遍接受,部分国外厂家也使用这个命名,并且采用对应的英文译名Variable-frequency Drive作为产品通用名称,部分日本厂家也逐渐接纳这个命名。
历史
变频技术诞生背景是交流电动机无级调速的广泛需求。传统的直流调速技术因体积大故障率高而应用受限。
- 1960年代以后,电力电子器件普遍应用晶闸管及其升级产品。但其调速性能远远无法满足需要。
- 1970年代开始,脉宽调制变压变频(PWM-VVVF)调速的研究得到突破,1980年代以后微处理器技术的完善使得各种优化算法得以容易的实现。
- 1980年代中后期,美、日、德、英等发达国家的VVVF变频器技术实用化,商品投入市场,得到广泛应用。
最早的变频器可能是日本人买下英国专利來研制的。不过美国和德国凭借电子元件生产和电子技术的优势,高階产品迅速抢占市场。
系統描述及運作
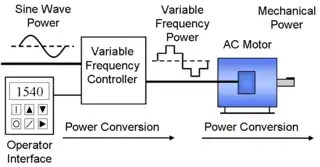
变频器是一個驅動系統中的一部份,其中重要的組件包括交流馬達、驅動控制器(即变频器)本身以及变频器的操作介面[2]:p210–211[4]:p4。
交流馬達
变频器所驅動的交流馬達一般是三相感應馬達,有些变频器可以驅動單相馬達或特殊的同步馬達使用,但主要仍以驅動三相感應馬達為主,在成本上也比較便宜。一般常會用變頻器驅動為定速驅動而設計的感應馬達,不過變頻器驅動感應馬達時,其電壓應力也會提高,因此一般會建議選用為變頻器驅動而設計的變頻馬達,且需符合NEMA標準MG-1的Part31[4]:p13,也就是馬達在沒有雜訊濾波器或電抗器的條件下,可以承受大小為額定電壓3.1倍,上昇時間不小於0.1μs的電壓[5]。
变频器
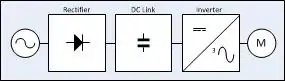
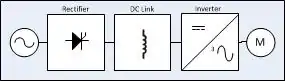
变频器部份是一個利用固態電子器件的電力電子系統,大多數的变频器是交流/交流轉換器,輸入及輸出都是交流的電壓。不過像使用共同直流電源(common DC bus)或是利用太陽能為電源時,則會使用直流/交流轉換器的架構。交流/交流轉換器可分為三個部份:分別是交流轉換為直流的整流器、直流鏈(DC link)及是直流轉換為交流的逆變器,其中又以電壓源變頻器(Voltage-source inverter,簡稱VSI)最常見。
電壓源變頻器所用的整流器,最簡單的是三相、六步脈衝、全波整流的二极管电桥,其直流鏈包括一個大容量的電容,可以平滑直流輸出的漣波及提供後級逆變器穩定的電壓輸入,再利用逆變器的主動功率晶體將電壓轉換為近似弦波的交流電壓輸出。電壓源變頻器的輸入功因較導通角控制的電流源變頻器(CSI)或負載換流變頻器(LCI)要高,其失真量也較低。變頻器也可以規劃成將單相交流電轉換為三相交流電的相轉換器[6]。
自1950年代起,因著固態功率元件額定電壓、電流及切換頻率的大幅增加,使得變頻器技術有明顯的進步。絕緣閘雙極電晶體(IGBT)在1983年發明[7],自1990年代起成為變頻器逆變器中最常使用的功率晶體 [8][9][10]。
變頻器驅動馬達的方式有很多,其中最簡單的是V/f純量控制,變頻器的輸出電壓和輸出頻率成正比,適用在定轉矩的負載中。例如460V,60 Hz的馬達,其電壓和頻率的比例為460/60 = 7.67 V/Hz,電壓和頻率的關係稱為V/f曲線.有些V/f控制的變頻器有輸出電壓和輸出頻率平方成正比的曲線,或是多段可設定的V/f曲線[11][12]。V/f控制可以適用在許多簡單的應用中,但一些需要低速高轉矩、動態速度調整、位置控制或轉矩控制的高階應用中,較不適合使用V/f控制。
另外二種常用的驅動技術分別是向量控制及直接轉矩控制(DTC),根據輸出電流及馬達轉速調整輸出電壓的大小及角度[13],目的是精準控制馬達的磁通及轉矩。
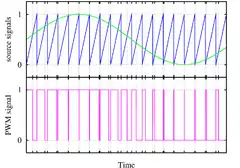
變頻器的輸出是利用逆變器,用脈衝寬度調變(PWM)的方式輸出交流電壓,其中弦波PWM(SPWM)是最直接調整馬達電壓及頻率的方式,在右圖上方,有大小及頻率均可調整的參考弦波訊號(綠色)及鋸齒型的載波訊號(藍色),若參考信號超過載波,則輸出高電位,反之,則輸出低電位,即可產生一個脈衝寬度隨時間變化的輸出訊號,輸出訊號在濾波後即接近弦波[14][8][15]。變頻器的脈衝寬度調變除了SPWM外,還有其他的方式,其中空間向量調變(SVPWM)越來越受到歡迎[16]。
利用變頻器可以將馬達在大於額定速度的條件下運作,但提供給馬達的功率不得超過其額定功率。這種應用稱為「弱磁」,電壓和頻率的比例會比較低。永磁同步馬達由於磁鐵產生的磁鏈為定值,因此弱磁區的速度範圍較窄,繞線轉子馬達及感應馬達弱磁區的速度範圍較廣。在弱磁時,馬達速度提高了,但其輸出轉矩會下降,例如對100 hp, 460 V, 60 Hz, 1775 RPM(4極)的感應馬達提供460 V, 75 Hz的電壓(6.134 V/Hz),其轉速為額定轉速的125%(2218.75 RPM),在輸出功率不超過100%的條件下,其轉矩只有額定轉矩的60/75 = 80%。若感應馬達的速度更高時,因著崩潰轉矩(breakdown torque)的下降,馬達所能輸出的轉矩會更低[註解 1]。一般馬達可輸出額定功率的轉速上限約為額定轉速的130%至150%,繞線同步馬達的轉速上限更高,有些碾軋用的馬達可以在額定轉速的200%至300%時輸出額定功率,馬達的最大轉速則受轉子的機械強度所限制。
變頻器中會有一個以微处理器或數位訊號處理器為核心的嵌入式系統,控制變頻器的運作。相關程序則是在微处理器或者數位訊號處理器的韌體中。變頻器會提供顯示資訊、變數及機能方塊有關的參數,使用者可以透過操作器或通訊進行修改,來監制及保護變頻器及驅動的馬達及設備[8][17]。
變頻器可以配合以下的功率選配件使用:
操作介面

变频器一般會有一個操作器作為操作介面,有按鍵可以啟動及停止馬達運轉,及調整馬達轉速,操作器的其他功能可能包括正反轉切換、切換由操作器設定速度或是由外部程序控制訊號設定速度等。变频器一般會包括一組文數字的顯示介面及幾個LED燈,以提供變頻器的相關資訊,顯示介面可能是有七段顯示器或液晶螢幕。操作器一般會設計在變頻器的正前方,多半是用信號線和變頻器連接。
除了操作器外,變頻器也會提供輸入及輸出端子,可以連接按鈕、開關或來自其他設備的信號,信號類型可能是數位、類比或是脈波型的。變頻器也常會提供串列通信埠,以提供電腦或PLC規劃及監控變頻器的運作[8][20][21]。
变频器運作
变频器可以分為單象限、二象限及四象限運作,四個象限的定義如下:[22][23][24]
- 第一象限,馬達正轉運轉[25],能量從變頻器到馬達,馬達的轉速及轉矩都為正。
- 第二象限,馬達正轉回升或減速剎車運轉,馬達呈發電機模式,能量從馬達到變頻器,轉速為正,轉矩為負。
- 第三象限,馬達反轉運轉,能量從變頻器到馬達,馬達的轉速及轉矩都為負。
- 第四象限,馬達反轉回升或減速剎車運轉,馬達呈發電機模式,能量從馬達到變頻器,轉速為負,轉矩為正。
其中第一象限及第三象限是轉速及轉矩同方向,第二象限及第四象限是轉速及轉矩反方向。
大部份的應用只在第一象限內運作,應用過程中都是由變頻器提供能量給馬達,例如像變動轉矩的負載(如離心泵浦及風扇)及一些定轉矩負載,像压出机,其轉速及負載均為正。
有些應用會在第一及第二象限內運作,表示其速度為正,但轉矩可能為正或為負,像風扇的減速時間若比其機械損失消耗能量的速度要快,就會進入第二象限。有些資料定義二象限運作是在第一及第三象限內運作,其速度及轉矩可能同為正或同為負。
有些應用會有四象限的運作,其速度及轉矩都可以為正值或負值,而速度和轉矩的方向可能相同,也可能相反,例如升降機在車廂滿載時上行,變頻器需提供能量給馬達,速度和轉矩的方向相同,若在車廂滿載時下行,馬達需提供能量給變頻器,速度和轉矩的方向相反,有些非平面使用的輸送帶也有類似特性。當變頻器的直流鏈電壓小於馬達反電動勢(Back EMF),且變頻器的電壓及反電動勢極性相同時,會出現能量回升(Regeneration)的現象,也就是能量從馬達流到變頻器[26]。
馬達若不透過變頻器,直接接一般三相交流電源,在啟動瞬間會有很大的突入電流,約為額定電流的6至8倍。若使用變頻器啟動,變頻器一開始會輸出較小頻率及電壓的交流電壓給馬達,再依已規劃好的速度提昇頻率及電壓,此啟動方式比較不會造成大的突入電流,配合變頻器啟動,馬達在低速時可以在輸入電流不到額定電流50%的條件下輸出150%的額定轉矩。若經過適當的調整及控制技術,馬達可以從靜止到額定轉速的轉速範圍內,都輸出150%的額定轉矩[27]。不過一般馬達的散熱風扇是由馬達本身驅動,在低速時風扇轉速也一起變慢,散熱效率不佳,若在低速運轉時,因為冷卻條件的惡化,不太容易在低速時有明顯的大轉矩,需透過獨立提供風扇電源的專用馬達才比較有可能。
馬達透過變頻器減速的過程和啟動加速的過程類似,變頻器用已規劃好的速度降低頻率及電壓,當頻率接近零時,變頻器停止輸出電壓,馬達自然停止。另一種停止方式是變頻器不降低頻率及電壓,直接停止輸出,馬達會因為本身的摩擦力而停止,但前者可提供的剎車轉矩較大,馬達減速停止所需的時間也較短。減速過程可能會有能量由馬達進入變頻器,若在直流鏈上加裝一個由功率晶體及電阻組成的剎車電路,將馬達回昇的能量轉換為熱能,可以提昇變頻器的剎車轉矩。若配合四象限的整流器,也就是主動式前端(active front end),變頻器在剎車時可以產生反向轉矩,並且將能量回灌到三相交流電源端。
優點
節能
許多馬達的應用是在定頻下驅動馬達,也就是直接用交流電源作為馬達的電源,交流電源的頻率即為馬達的頻率,但其中一些應用可以允許馬達以比交流電源頻率要慢的頻率運轉,此時若改用變頻器驅動,在變頻的模式下運作,可以節省不必要的能源消耗。
變頻器应用于风机水泵型负载时节能效果明显[28],離心式的風扇和泵的轉矩和轉速的平方成正比[29],功率則和轉速的立方成正比。因此速度略為調降時,在變速的模式下運作可以節省較多的能源,例如在不考慮铁损铜损及热损耗的條件下,一台离心泵的电动机转速下降到工频转速的79%时,其耗电量約只有原來的50%,這是依照流體機械理論中相似定律定義離心負載中各物體量相對關係下的結果。
不過在實際應用時,需考慮馬達的铁损、铜损及热损耗,因為變頻運轉需配合變頻器使用,定頻運轉不用,比較起來多了變頻器本身消耗的能量,若變頻運轉所節省的能量不夠多,變頻運轉就無法達到節能的效果。
以美國為例,估計約60-65%的電能是用來驅動馬達,其中又有75%是用在負載特性為變動轉矩的風扇、泵及壓縮機[30]。若使用變頻器驅動,估計可節省四千萬顆馬達中所消耗能量的18%[31][32]。
所有已安裝的交流馬達中,約只有3%是用變頻器驅動[33]。不過在新安裝的交流馬達中.約有30%至40%會配合變頻器使用[34]。
下表列出不同容量的交流馬達,其數量及在交流馬達總能耗中,所佔的比例:
| 小功率 | 泛用,中功率 | 大功率 | |
|---|---|---|---|
| 功率 | 10W至750W | 750W至375 kW | 375 kW至100MW |
| 電源相數及電壓 | 單相,<240V | 三相,200V至1kV | 三相,1kV至20kV |
| 在交流馬達總能耗中所佔的比例 | 9% | 68% | 23% |
| 總數量(百萬) | 2000 | 230 | 0.6 |
控制性能
在工業及商業應用中,交流變頻器常用來控制加速度、流量、壓力、速度、溫度、張力及轉矩等物理量[36]。
配合定頻啟動馬達的負載,在啟動時有高啟動轉矩,電流突波可以到滿載電流的八倍。若配合變頻器使用,啟動變頻器會慢慢的將馬達加速到定速,減少機械及電子的應力,也降低保養及維修的成本,延長馬達及設備的壽命。
變頻器也可以讓馬達以一個事先規劃的方式運轉,進一步的減少機械及電子的應力。例如一般變頻器啟動時,速度會連續變化,而加速度會有不連續的變化。若在運送帶的應用中,可以配合S曲線的機能,使加減速時的加速度也是連續變化,使加減速的過程更為平順,減少運送帶在加減速過程出現的背隙。
直流馬達的控制性能一般會比交流馬達要好,包括可以在低速下連續運轉,有回昇機能,可配合四象限運轉,也可以有頻繁的加減速,但因為有碳刷,在危險環境下需額外的保護[37]。下表比較交流驅動器及直流驅動器的一些重要特性,其中速度部份都是相對馬達同步轉速的百分比:[38][39][40]
| 驅動器種類 | 直流 | 交流變頻器 | 交流變頻器 | 交流變頻器 | 交流變頻器 |
|---|---|---|---|---|---|
| 控制方式 | 直流有刷 | V/Hz控制 | 向量控制 | 向量控制 | 向量控制 |
| 控制架構 | 閉迴路 | 開迴路 | 開迴路 | 閉迴路 | 開迴路 (高頻諧波注入) |
| 馬達 | 直流馬達 DC | 感應馬達 IM | 感應馬達 IM | 感應馬達 IM | 內藏式永磁馬達 IPM |
| 典型的調速比例(%) | 0.01 | 1 | 0.5 | 0.01 | 0.02 |
| 典型定轉矩的速度範圍(%) | 0-100 | 10-100 | 3-100 | 1-1500 | 1-100 |
| 100%轉矩的最低頻率(%) | 靜止 | 8% | 2% | 靜止 | 靜止(200%) |
| 是否可同時驅動多個馬達 | 否 | 是 | 否 | 否 | 否 |
| 故障保護(透過保險絲或是驅動器本身) | 保險絲 | 驅動器內建 | 驅動器內建 | 驅動器內建 | 驅動器內建 |
| 保養 | 碳刷 | 低 | 低 | 低 | 低 |
| 速度回授方式 | 轉速計或編碼器 | 無 | 無 | 編碼器 | 無 |
變頻器分類及額定
變頻器拓撲


交流变频器可以分為以下幾種拓撲[註解 3][41][42]:
- 電壓源變頻器(VSI):在電壓源變頻器中,二極體橋式整流的直流輸出接到電容器中,電容器為儲能元件,提供穩定的電壓給變頻器,大部份的馬達驅動器都是電壓源變頻器,輸出為PWM的電壓[註解 4]。
- 電流源變頻器(CSI):在電流源變頻器中,矽控整流器(SCR)橋式整流的直流輸出接到電感器中,電感器為儲能元件,提供穩定的電流給變頻器,電流源變頻器的輸出可以是PWM輸出或是六步方波輸出。
- 六步方波變頻器[43]:可以是電壓源變頻器或電流源變頻器,一般會稱為脈波振幅調變(PAM)驅動器[44]或方波驅動器[45]。六步方波變頻器中,SCR橋式整流的直流輸出經過電容器,提供達靈頓對或IGBT六步方波的電壓或電流給馬達[46]。
- 循环换流器或矩陣轉換器(matrix converter):循环换流器及矩陣轉換器都沒有中間儲存能量的直流電容器或電抗器,循环换流器可視為三相的電流源,三相之間再接三個反並聯連接的SCR橋式整流器,每一相個別產生一相的交流電源,矩陣轉換器則是將每一相電源各接三個開關,分別對應馬達的三相,用三相電源的九個開關切換控制輸出的電壓,一般矩陣轉換器的開關會以IGBT為基礎。。
- 双馈电机滑差功率回復系統:只適用在繞線轉子馬達,轉子的滑差功率透過整流,再經過電感器濾波,透過另一個逆變器將能量回復到電源端.可以透過調整直流電流來調整馬達的轉速。
負載的轉矩及功率特性
变频器的負載可以依其轉矩及功率特性分為以下幾類:
- 變轉矩:一般是指轉矩和頻率(或其平方)成正比,例如離心扇、離心泵浦等應用。
- 定轉矩:例如輸送帶或是容積式泵。
- 定功率:例如工具機或曳引應用。
功率及電壓範圍
变频器可以配合不同電壓及電流範圍的單相及三相馬達使用。低壓(LV)變頻器一般是指輸出電壓小於或等於690 V的變頻器,低壓變頻器的功率範圍最大可以到約5或6MW[48],不過低壓變頻器若應用在較大的功率,其電流也會比較高,而馬達銅損和電流的平方成正比,因為經濟性的考量,一般在功率超過375 kW(500HP)到750 kW (1000HP)的範圍時,就會使用中壓(MV)的變頻器,配合中壓的馬達使用。
中壓變頻器有各種不同的拓撲(參考表3),其差異是如何用額定電壓較小的功率模組組合出所需的額定電壓[49],其變頻器額定電壓會大於或等於以下標準馬達額定電壓中的一個:2.3/4.16 kV (60 Hz)或3.3/6.6 kV (50 Hz)。有些應用會用低壓的變頻器,透過升壓變壓器驅動中壓的馬達。
在發展過程中,中壓變頻器在設計時需要的考量會比低壓變頻器要多[50][51]。中壓變頻器的功率最大可以到100 MW,由於不同的功率額定、性能、電源品質及可靠度要求,其中會出現許多不同的變頻拓撲[52][53][54]。
依馬達及驅動架構的分類
變頻器可以用以下二種方式分類:
表1:依馬達的分類
| 馬達 |
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
表2:依變頻器拓撲的細部分類
|
拓撲 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 間接型AC-AC |
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 直接型AC-AC |
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
表3:變頻器拓撲
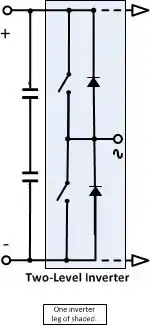
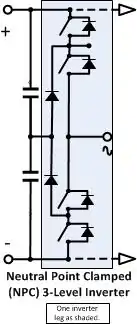
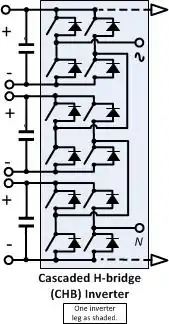

表1至表3的符號及縮寫說明
| ^ | 換流器功率模組(整流器則使用二極體) |
| ^^ | 換流器及整流器的功率模組 |
| CHB | 级联H桥 |
| CSI | 電流源變頻器 |
| CSR | 電流源整流器 |
| GCT | 门极换流晶闸管 |
| GTO | 可關斷晶閘管 |
| IGBT | 絕緣柵雙極晶體管 |
| LCI | 負載換流變頻器 |
| NPC | 中性點嵌位 |
| PAM | 脈波振幅調變 |
| PWM | 脈衝寬度調變 |
| SCR | 矽控整流器 |
| SGCT | 對稱门极换流晶闸管 |
| VSI | 電壓源變頻器 |
應用考量
電源端諧波
變頻器整流器將交流電壓轉換為直流電壓時會出現非線性的半波整流電流,因此造成電源端電流及電壓的畸變。若變頻器及其他非線性的負載佔總負載(或是電源容量)的比例夠大,這些負載帶來的畸變會影響交流電的波形,其使用同一電網的其他設備有負面的影響。
當交流電源端的電壓因為諧波而產生畸變,其他使用交流電源端設備(例如直接接交流電源的馬達)的功率損失會增加,會造成設備過熱,降低其使用壽命。而諧波對於供電站的變壓器及功因補償用電容均有負面影響,尤其諧波可能會使電容器產生共振,使諧波的振幅變的更大。
電力公司常會要求客戶端的諧波需符合在IEC或IEEE的相關標準,例如IEEE 519標準限制客戶在使用一般的交流供電系統時.在供電端的各頻率最大諧波電壓不得超過市電電壓的3%,而電壓總諧波失真(THD)不得超過5%[62]。
改善電源端諧波的方式有許多種,例如在變頻器的直流鏈加裝電感器、交流電源端加裝電感器、變頻器的電源加裝有多組相位移繞組的變壓器(例如12脉波整流变压器)[63]、或是將整流端由二極體改為用IGBT驅動(主動式前端)等。在電源端加裝主動式或被動式低波濾波器也可以降低諧波。可以針對五次、七次、十一次、十三次……等kq+/-1次的諧波頻率進行濾波,其中k為整數,q為整流器的脈波數,一般三相橋式整流器的q為6[64]。
長導線效應
電壓型變頻器的輸出PWM電壓有高頻的載波成份,電壓的上昇時間很短,此時需將連接到馬達的導線視為傳輸線,考慮傳輸線的效應,由於導線和馬達的阻抗不同,若導線很長時,輸出電壓的脈波會從馬達端子反射到導線,所造成的過電壓等於直流鏈電壓的2倍,或是額定線電壓的3.1倍,造成導線及馬達繞線的高電氣應力,甚至會破壞絕緣。若是電壓為460V或575V的系統,使用第3代,上昇時間為0.1ms的IGBT,最長建議的導線長度為50米。若要避免長導線造成的過電壓,可以縮短導線長度、降低載波頻率、加裝dV/dt濾波器、加裝低通的LCR弦波濾波器、或是使用變頻馬達(其額定電壓為600V,可以承受上昇時間小於0.1ms的脈波)[69][70][71]。
當載波頻率降低時,不但會改善長導線造成的過電壓,也會降低變頻器的發熱量,不過當載波頻率低於6kHz,其噪音會變大,在3kHz時最明顯,因此仍需要根據噪音、變頻器的發熱、電壓絕緣應力、馬達共模電壓等因素選擇最佳的載波頻率。透過加裝LCR低通濾波器或dV/dt濾波器可以進一步的減少諧波成份。
馬達軸承電流
PWM馬達驅動器會產生高頻的共模電壓及電流,進而產生軸電壓,破壞馬達的軸承[72]。當軸上的高頻電壓藉由軸承流到接地點時,在軸承的滾珠和座圈之間會出現放電加工的火花。久而之之會在軸承座圈上產生侵蝕的圖案。大馬達繞組的雜散電容提供高頻電壓路徑可以通過軸承,因此軸承電流會形成一個迴路。小馬達若接地不良時也可能會產生高頻的軸承電流[73]。
避免軸承電流的方式有以下幾種:良好的配線及接線、中斷軸承電流的傳導路徑、針對共模電流進行濾波或阻尼的處理。良好的配線及接地包括馬達使用有屏蔽層、幾何對稱的纜線,裝置軸接地電刷,以及使用有導電性的軸承用潤滑油。若使用絕緣的軸承,或是特製有靜電屏蔽的馬達,可以中斷軸承電流的傳導路徑。除了針對軸承電流進行濾波或阻尼外,使用三電平的變頻器或是矩陣轉換器也可以改善軸承電流[73][74]。
馬達剎車
感應馬達在驅動負載時,由於輸出轉矩,馬達有滑差產生,馬達轉速會略低於同步轉速。當馬達減速時,馬達會輸出負轉矩,此時馬達會類似發電機,將機械能轉換為電能,回灌給變頻器的直流鏈(電容器或電感器)。电阻制动(dynamic braking)也稱為動態剎車,是指變頻器直流鏈中內建或外掛的剎車斬波器,可連接剎車電阻,將此能量轉換為電阻器的熱能,不過電阻器可能需要散熱裝置,以避免電阻器過熱[24]。
動態剎車是將馬達的動能轉換為電阻器的熱能。另外二種剎車的方式是再生制動及直流剎車,再生制動是指變頻器的架構允許將馬達的動能再輸回電網,但有此機能的變頻器價格較高[75]。直流剎車則是變頻器輸出直流電壓及電流給馬達,將馬達的動能轉換為馬達本身的熱能。
在變頻器應用時,若有多台變頻器容量相當,且不會同時進行減速,也可以使用共同直流鏈(common DC bus)的技術,將各台變頻器的直流鏈相連接,有能量回灌給變頻器的直流鏈時,可以由其他幾台的電容器吸收,避免因能量回昇出現變頻器過電壓的情形。
能量回昇機能


回昇型交流變頻器是指變頻器可以將馬達剎車時回昇的能量,並且可以回昇到交流電源系統。
循環換流器、Scherbius型變頻器、矩陣轉換器、電流源變頻器(CSI)及負載換流變頻器(LCI)本身都有可將能量回昇到交流電源系統的功能,不過電壓源變頻器(VSI)則需針對整流器的線路進行修改才可提供此機能[77][78]。
回昇型交流變頻器會增加成本,若以成本考量,只有在系統常常進行剎車及啟動,回昇能量後可節省電費較其成本高時,安裝回昇型交流變頻器才有其經濟效益[77]。若需要控制高慣量負載或是被動拖曳型負載(overhauling load),較適合使用回昇型交流變頻器[2]:p210–215[3][79]。
以下是一些應用例:
- 工廠生產線輸送帶用的變頻器,大約每幾分鐘就停一次,停止時由各站組裝成品,當組裝完成後,輸送帶才繼續前進,將成品送到下一站。
- 起重機的應用,在拉重物上昇時的減速過程,以及在拉重物下降時的定速過程都需要剎車機能。
- 各種插電式或混合式的電動車(參照插圖及油電複合動力系統)
註解
參考資料
- 佟纯厚、郭文良等《近代交流调速》冶金工業版
- 佟纯厚《国内外交流调速发展的现状和方向》
- 佟纯厚《近代交流调速技术的发展动向》[J].冶金自动化. 1985.(03)
- Campbell, Sylvester J. . New York: Marcel Dekker, Inc. 1987: 79–189. ISBN 0-8247-7728-X.
- Jaeschke, Ralph L. . Cleveland, OH: Penton/IPC. 1978.
- Siskind, Charles S. . New York: McGraw-Hill, Inc. 1963: 224. ISBN 0-07-057746-3.
- NEMA Standards Publication. . Rosslyn, VA USA: National Electrical Manufacturers Association (now The Association of Electrical Equipment and Medical Imaging Manufacturers). 2007 [2008-03-27]. (原始内容存档于2008-04-28).
- Siemens NEMA Application guide 页面存档备份,存于page 4
- Campbell, pp. 79-83
- Bose, Bimal K. . Amsterdam: Academic. 2006: 22. ISBN 978-0-12-088405-6.
- Bartos, Frank J. . Control Engineering (Reed Business Information). 2004-09-01.
- Eisenbrown, Robert E. . . University of Wisconsin, Madison, WI, USA: WEMPEC: 6–10. 2008-05-18.
- Jahn, Thomas M.; Owen, Edward L. . IEEE Transactions on Power Electronics (IEEE). Jan 2001, 16 (1): 17–25. doi:10.1109/63.903985.
- : Hardware-Part 2: slide 2 of 9. [2012-04-18]. (原始内容存档于2012-04-19).
- Bose, Bimal K. . New York: IEEE Press. 1980. ISBN 0-87942-146-0.
- Yano, Masao; 等. (PDF): 13. [2012-04-18]. (原始内容存档 (PDF)于2012-06-02).
- Bose (2006), p. 183
- Campbell, pp. 82–85
- Bose, Bimal K. (PDF). Doha,Qatar: 12. 2011 [2012-02-08]. (原始内容 (PDF)存档于2014-05-02).
- Basics of AC Drives, p. Programming: slide 3 of 7
- (PDF): 2. [2012-05-22]. (原始内容存档 (PDF)于2012-09-05).
- Basics of AC Drives, p. Hardware - Part 2: slide 7 of 9
- Cleaveland, Peter. . Control Engineering (Reed Business Information). 2007-11-01.
- Campbell, pp. 107-129
- (PDF). [2012-04-20]. (原始内容存档 (PDF)于2012-01-05).
- (PDF). [2012-04-20]. (原始内容存档 (PDF)于2014-10-28).
- Basics of AC Drives, pp. Hardware - Part 1: slides 9-10 of 11
- Energy Regeneration, slide 3
- Energy Regeneration, slide 6
- Campbell, pp. 95-102
- 張永宗、陳清良. . 台灣綠色生產力基金會-節能服務網. [2012-04-05]. (原始内容存档于2009-03-17).
- (PDF). 印度國家生產力委員會. [2012-12-03]. (原始内容 (PDF)存档于2010-06-13).
- Bose, Bimal K. . Industrial Electronics Magazine, IEEE. June 2009, 3 (2): 9. doi:10.1109/MIE.2009.932709.
- Spear, Mike. . ChemicalProcessing.com. [2012-01-27].
- Bose, B. K. . IEEE Transactions on Industrial Electronics. Feb 2009, 56 (2): 581–588.
- (PDF). [2012-01-27]. (原始内容存档 (PDF)于2012-04-17).
- Lendenmann, Heinz; 等. (PDF). [2012-04-18]. (原始内容存档 (PDF)于2013-05-10).
- Waide, Paul; Brunner, Conrad U. (PDF). International Energy Agency. 2011 [2012-01-27]. (原始内容 (PDF)存档于2012-02-16).
- Basics of AC drives, p. Overview: slide 5 of 6
- (PDF): 11. [2012-03-22]. (原始内容存档 (PDF)于2011-11-25).
- (PDF): 2. [2012-03-22]. (原始内容存档 (PDF)于2012-08-13).
- Drury, Bill. 2nd. Stevenage, Herts, UK: Institution of Engineering and Technology. 2009: 474. ISBN 978-1-84919-101-2.
- Kang, Jun. (PDF). [2012-09-07]. (原始内容 (PDF)存档于2013-07-18).
- Morris, Ewan; Armitage, David. (PDF). pp. 7-13. [2012-03-16]. (原始内容存档 (PDF)于2012-04-12).
- Paes, Richard. . Joint Power Engineering Society-Industrial Applications Society Technical Seminar (IEEE Southern Alberta Chapter). June 2011: pp. 1–78.
- McMurray, William. . Proceedings of the IEEE. April 1988, 76 (4): 428–437.
- Carrow, Robert S. . Albany, NY: Delmar Thomson Learning. 2000: 51. ISBN 0-7668-1923-X.
- Drury, p. 6
- Sandy, Williams; Baillie, Alastair; Shipp, David. . Society of Petroleum Engineers. 2003.
- Drury, pp. 6-9
- . 2009-07-19.
- Wu, Bin. (PDF). IEEE PES: slide 22. 2005 [2012-02-03]. (原始内容存档 (PDF)于2012-04-04).
- Bartos, Frank J. . Control Engineering (Reed Business Information). 2000-02-01.
- Lockley, Bill; Wood, Barry, Paes, Richard, DeWinter, Frank. . IEEE Industry Applications Magazine. Jan.-Feb., 14 (1): 21–28. doi:10.1109/MIA.2007.909800.
- Wu, slide 159
- Klug, Dieter-Rolf; Klaassen, Norbert. . . 2005. doi:10.1109/EPE.2005.219669.
- (PDF). [2012-02-03].
- Bose (2006) pp. Chapter 6–8, especially pp. 328, 397, 481
- (PDF). USDOE - Europump - Hydraulic Institute: 9, Fig. ES-7. May 2004 [2012-01-29]. (原始内容 (PDF)存档于2011-10-27).
- Wu, Slide 159
- Rashid, Muhammad H.,(Ed.). 2nd. Burlington, MA: Academic. 2006: 903. ISBN 978-0-12-088479-7.
- Rodriguez, J.; Jih-Sheng Lai, , Fang Zheng Peng,. . IEEE Transactions on Industrial Electronics. 2002, 49 (4): 724–738. doi:10.1109/TIE.2002.801052.
- Ikonen, Mika; 等. (PDF). Lappeenranta University of Technology. 2005 [2012-12-06]. (原始内容存档 (PDF)于2014-02-11).
- Kouro, Samir; Rodriguez, Jose; Wu, Bin;Bernet, Steffen; Perez, Marcelo. . IEEE Industry Applications Magazine. Jul/Aug, 18 (4): 26–39. doi:10.1109/MIAS.2012.2192231.
- IEEE 519, pp. 69-70
- (PDF). 2002-05-17 [2009-07-29]. (原始内容存档 (PDF)于2011-06-26).
- . 1992. doi:10.1109/IEEESTD.1993.114370.
- Skibinski, Gary; Breit, Stephen. . Fifty-First Annual Conference Petroleum and Chemical Industry Technical Conference (IEEE). 2004: 269–278. doi:10.1109/PCICON.2004.1352810.
- (PDF). [2012-02-14]. (原始内容 (PDF)存档于2012-08-13).
- Malfait, A.; Reekman, R.; Belmans, R. . 29th Annual Meeting Proceedings of IEEE Industry Applications Society. 1994: 693–700.
- (PDF). [2012-02-15]. (原始内容存档 (PDF)于2014-07-11).
- Skibinski, p. 274
- Novak, Peter. . EC&M. [2012-04-18]. (原始内容存档于2012-04-13).
- Finlayson, P.T. . IEEE Industry Applications Mazagine. Jan/Feb, 4 (1): 46–52.
- Yung, Chuck. . PlantServices.com [Plant Services] (Itasca, IL: PtmanMedia). 2007: pp. 1–2 [2012-12-07]. (原始内容存档于2012-08-07).
- (PDF). 1999-12-01 [2011-06-14]. (原始内容 (PDF)存档于2011-07-20).
- Swamy, M.; Kume, T. . . IEEE: XLV–LVI, Fig. 16. May 2008.
- Technical Guide No. 8, pp. 26-30
- Olszewski, Mitch; 等. (PDF). Oak Ridge National Laboratory. 2011 [2012-09-26]. (原始内容存档 (PDF)于2012-12-24).
- Dubey, Gopal K. 2. Pangbourne: Alpha Science Int. 2001. ISBN 1-84265-083-1.
- Rashid, p. 902, Table 33.13
- Campbell, pp. 70–190