Z轉換
历史
现在所知的Z变换的基本思想,拉普拉斯就已了解,而1947年W. Hurewicz用作求解常系数差分方程的一种容易处理的方式。[1] 后来由1952年哥伦比亚大学的采样控制组的雷加基尼和查德称其为“Z变换”。[2][3]
E. I. Jury后来发展并推广了改进或高级Z变换。[4][5]
Z变换中包含的思想在数学里称作母函数方法,该方法可以追溯到1730年的时候,棣莫弗与概率论结合将其引入。[6] 从数学的角度,当把数字序列视为解析函数的(洛朗)展开时,Z变换也可以看成是洛朗级数。
定義
像很多积分变换一样,Z变换可以有单边和双边定义。






逆Z变换
逆Z变换为

其中 C 是完全处于收敛域(ROC)内的包围原点的一个逆时针闭合路径。在 ROC 是因果的情况下(参见例2),这意味着路径 C 必须包围 X(z) 的所有极点。
这个曲线积分的一个特殊情形出现在 C 是单位圆的时候(可以在ROC包含单位圆的时候使用,总能保证 X(z) 是稳定的,即所有极点都在单位圆内)。逆Z变换可以化简为逆离散傅里叶变换:

有限范围 n 和有限数量的均匀间隔的 z 值的Z变换可以用Bluestein的FFT算法方便地计算。离散时间傅里叶变换 (DTFT)—不要与离散傅里叶变换(DFT)混淆—是通过将 z 限制在位于单位圆上而得到的一种Z变换的特殊情况。
收敛域
收敛域(ROC)是指Z变换的求和收敛的复平面上的点集。

例1(无ROC)
令 x[n] = (0.5)n。在区间 (−∞, ∞) 上展开 x[n] 成为

观察上面的和

因此,没有一个 z 值可以满足这个条件。
例2(因果ROC)
令 (其中 u 是单位阶跃函数)。在区间 (−∞, ∞) 上展开 x[n] 得到


观察这个和

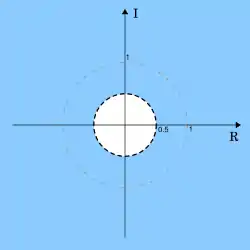
最后一个等式来自无穷几何级数,而等式仅在 |0.5z−1| < 1 时成立,可以以 z 为变量写成 |z| > 0.5。因此,收敛域为 |z| > 0.5。在这种情况下,收敛域为复平面“挖掉”原点为中心的半径为 0.5 的圆盘。
例3(非因果ROC)
令 (其中 u 是单位阶跃函数)。在区间 (−∞, ∞) 上展开 x[n] 得到


观察这个和

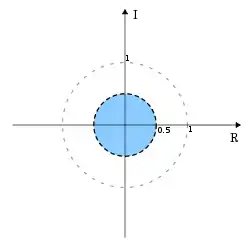
再次使用无穷几何级数,此等式只在 |0.5−1z| < 1 时成立,可以用 z 为变量写成 |z| < 0.5。因此,收敛域为 |z| < 0.5。在这种情况下,收敛域为中心在原点的半径为 0.5 的圆盘。
本例与上例的不同之处仅在收敛域上。这是意图展示只有变换结果是不够的。
实例结论
实例2和3清楚地表明,当且仅当指定收敛域时,x[n] 的Z变换 X(z) 才是唯一的。画因果和非因果情形的零极点图表明,在这两种情况下收敛域都不包含极点位于 0.5 的情形。这可以拓展到多个极点的情形:收敛域永远不会包含极点。
在例2中,因果系统产生一个包含 |z| = ∞ 的收敛域,而例3中的非因果系统产生包含 |z| = 0 的收敛域。
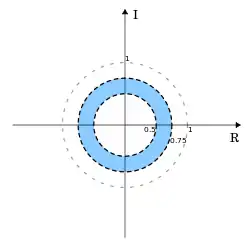
在有多个极点的系统中,收敛域可以既不包含 |z| = ∞ 也不包含 |z| = 0。画出的收敛域与一个圆形带。例如,

的极点为 0.5 与 0.75。收敛域会是 0.5 < |z| < 0.75,不包含原点和无穷大。这样的系统称为混合因果系统,因为它包含一个因果项 (0.5)nu[n] 和一个非因果项 −(0.75)nu[−n−1]。
一个系统的稳定性可以只通过了解收敛域来确定。如果收敛域包含单位圆(即 |z| = 1),那么系统是稳定的。在上述系统中因果系统(例2)是稳定的,因为 |z| > 0.5 包含单位圆。
如果给定一个没有收敛域的Z变换(即模糊的 x[n]),可以确定一个唯一的 x[n] 满足下列:
- 稳定性
- 因果性
如果你要稳定性,收敛域必须包含单位圆;如果你需要一个因果系统,收敛域必须包含无穷大,并且系统函数应为一个右边序列。如果你需要一个非因果系统,那么收敛域必须包含原点,且系统函数为左边序列。如果你既要稳定性,也要因果性,系统函数的所有极点都必须在单位圆内。
可以找到唯一的 x[n]。
性质
| 时域 | Z域 | 证明 | 收敛域 | |
|---|---|---|---|---|
| 记法 | ||||
| 線性 | 包含 ROC1 ∩ ROC2 | |||
| 时间膨胀 |
r: 整数 |
|||
| 降采样 | ohio-state.edu 或 ee.ic.ac.uk | |||
| 时移 | ROC,除了 k > 0 时 z = 0 和 k < 0 时 z = ∞ | |||
| Z域的
尺度性质 |
||||
| 时间反转 | ||||
| 共轭复数 | ||||
| 实部 | ||||
| 虚部 | ||||
| 微分 | ||||
| 卷积 | 包含 ROC1 ∩ ROC2 | |||
| 互相关 | 包含 与 的ROC的交集 | |||
| 一阶差分 | 包含 X1(z) 与 z ≠ 0 的ROC的交集 | |||
| 累积 | ||||
| 乘法 | - |
















































初值定理:如果 x[n] 为因果的,那么

终值定理:如果 (z−1)X(z) 的极点在单位圆内,则

常见的Z变换对表
这里:

是单位阶跃函数而

是离散时间单位冲激函数。两者通常都不认为是真正的函数,但由于它们的不连续性把它们看成是分布(它们在 n = 0 处的值通常无关紧要,除非在处理离散时间的时候,它们会变成衰减离散级数;在本章节中对连续和离散时间域,都在 n = 0 处取 1,否则不能使用下表中收敛域一栏的内容)。同时列出两个“函数”,使得(在连续时间域)单位阶跃函数是单位冲激函数的积分,或(在离散时间域)单位阶跃函数是单位冲激函数的求和,因此要令他们的值在 n = 0 处为 1。
| 信号, | Z变换, | ROC | |
|---|---|---|---|
| 1 | 1 | 所有 z | |
| 2 | |||
| 3 | |||
| 4 | |||
| 5 | |||
| 6 | |||
| 7 | |||
| 8 | |||
| 9 | |||
| 10 | |||
| 11 | |||
| 12 | |||
| 13 | |||
| 14 | |||
| 15 | |||
| 16 | |||
| 17 | |||
| 18 | |||
| 19 | |||
| 20 | |||
| 21 |












































与傅里叶级数和傅里叶变换的关系
对于区域 |z|=1(称为单位圆)内的 z 值,我们可以通过定义 z=ejω 来用单一实变量的函数来表示该变换。于是双边变换就简化为了傅里叶级数:
-
()

也被称作 x[n] 序列的离散时间傅里叶变换(DTFT)。这个以 2π 为周期的函数是傅里叶变换的周期性求和,这使得它成为广泛使用的分析工具。要理解这一点,令 X(f) 为任意函数 x(t) 的傅里叶变换,该函数以某个间隔 T 采样就与 x[n] 序列相等。于是 x[n] 序列的DTFT可以写作:

若T的單位是秒,的單位即為赫兹。比較兩個數列可得 為标准化频率,單位是radians per sample。數值ω=2π對應 Hz. ,而且在替換 後, Eq.1可以表示為傅里叶变换X(•):





若數列x(nT)表示线性时不变系统的冲激响应,這些函數也稱為频率响应,當x(nT)是週期性數列,其DTFT在一或多個共振頻率發散,在其他頻率均為零。這一般會用在共振頻率,振幅可變的狄拉克δ函数表示。因為其週期性,只會有有限個振幅,可以用較簡單許多的离散傅里叶变换來計算。(參照離散傅立葉變換#周期性)
和拉氏变換的關係




线性常系数差分方程
线性常系数差分(LCCD)方程是基于自回归滑动平均的线性系统表达形式。

上面等式两边可以同时除以 α0,如果非零,正规化 α0 = 1,LCCD方程可以写成

LCCD方程的这种形式有利于更加明确“当前”输出 y[n] 是过去输出 y[n−p]、当前输入 x[n] 与之前输入 x[n−q] 的一个函数。
传递函数
对上述方程去Z变换(使用线性和时移法则)得到

整理结果

零点和极点
由代数基本定理得知分子有 M 个根(对应于 H 的零点)和分母有 N 个根(对应于极点)。用极点和零点重新整理传递函数为

其中 qk 为 k 阶零点,pk 为 k 阶极点。零点和极点通常是复数,当在复平面(z平面)作图时称为零极点图。
此外,在 z = 0 和 z = ∞ 也可能存在零点和极点。如果我们把这些极点和零点以及高阶零点和极点考虑在内的話,零点和极点的数目总会相等。
输出响应
如果一个系统 H(z) 由信号 X(z) 驱动,那么输出为 Y(z) = H(z)X(z)。通过对 Y(z) 部分分式分解并取逆Z变换可以得到输出 y[n]。在实际运用中,在分式分解 之后再乘 z 产生 Y(z) 的一个形式(含有很容易计算逆Z变换的项)往往很有用。

参考文献
- E. R. Kanasewich. 3rd. University of Alberta. 1981: 185–186. ISBN 978-0-88864-074-1.
- J. R. Ragazzini and L. A. Zadeh. . Trans. Am. Inst. Elec. Eng. 1952, 71 (II): 225–234.
- Cornelius T. Leondes. . Academic Press. 1996: 123. ISBN 978-0-12-012779-5.
- Eliahu Ibrahim Jury. . John Wiley & Sons. 1958.
- Eliahu Ibrahim Jury. . Krieger Pub Co. 1973. ISBN 0-88275-122-0.
- Eliahu Ibrahim Jury. . John Wiley & Sons. 1964: 1.
- Enders A. Robinson, Sven Treitel. . SEG Books. 2008: 163, 375–376. ISBN 9781560801481.
- E. R. Kanasewich. . University of Alberta. 1981: 186, 249. ISBN 9780888640741.
延伸阅读
- Refaat El Attar, Lecture notes on Z-Transform, Lulu Press, Morrisville NC, 2005. ISBN 978-1-4116-1979-1.
- Ogata, Katsuhiko, Discrete Time Control Systems 2nd Ed, Prentice-Hall Inc, 1995, 1987. ISBN 978-0-13-034281-2.
- Alan V. Oppenheim and Ronald W. Schafer (1999). Discrete-Time Signal Processing, 2nd Edition, Prentice Hall Signal Processing Series. ISBN 978-0-13-754920-7.
外部链接
- Hazewinkel, Michiel (编), , , Springer, 2001, ISBN 978-1-55608-010-4
- Z-Transform table of some common Laplace transforms 页面存档备份,存于
- Mathworld's entry on the Z-transform 页面存档备份,存于
- Z-Transform threads in Comp.DSP 页面存档备份,存于
- Z-Transform Module by John H. Mathews
- A graphic of the relationship between Laplace transform s-plane to Z-plane of the Z transform
